The May 8 meeting was pretty fast paced and the 1414 teams got a lot done. First we started with "stubots" - human simulation of the game, then debrief to see what we can learn about game play and strategy. We also did some field and lift testing with our existing robot. Then moved into brainstorm lists for the "what" portion of our process (not thinking of "how" yet).
Here's the corresponding video we shot at the meeting:
http://www.youtube.com/watch?v=Nc8CzrhfuBs
From Stubots autonomous play we learned:
- Bonus sack in high goal is biggest one score value
- Putting as many sacks in trough as possible seems easiest
- Moving entirely in a straight line (to sack pile of 5), then goals, is least complicated
- With only 15 seconds of auto, going out and coming back for instructions/repositioning more than once is highly unlikely.
- Don't forget about additional bonus sacks under troughs
- Down back wall line to "other" tile than reposition is possible
From Stubots driver control play we learned:
-Because of proximity of all troughs, descoring / rescoring troughs is viable
-It can get crowded at troughs
-trough is likely the goal to score most in
-score in high goal "when available"
-low goal is last option
- parking is good, but scoring additional sackscan be worth more in many cases
-questions: How much can a robot hold? Are sacks obstacles?
From our brief robot testing we learned:
- flat polycarbonate slides easily under sacks and sack when driven on ARE obstacles
- our existing arm/lift (from Gateway) - 5:1 reduction, 3 motors, surgical tube assist - bogged down in less than 20 seconds with both six and four sack tests. Conclusion - the density of these sacks will put significantly more stress on a lifting mechanism than the Gateway pieces as there will be more of them toward the end of the moment arm.
Next our three teams were split up into their small groups to list all known autonomous and driver controlled strategies, then they were shared with the whole group, here:
Lastly our teams brainstormed what they would like to see in our robot features, and the consensus view came out like this:
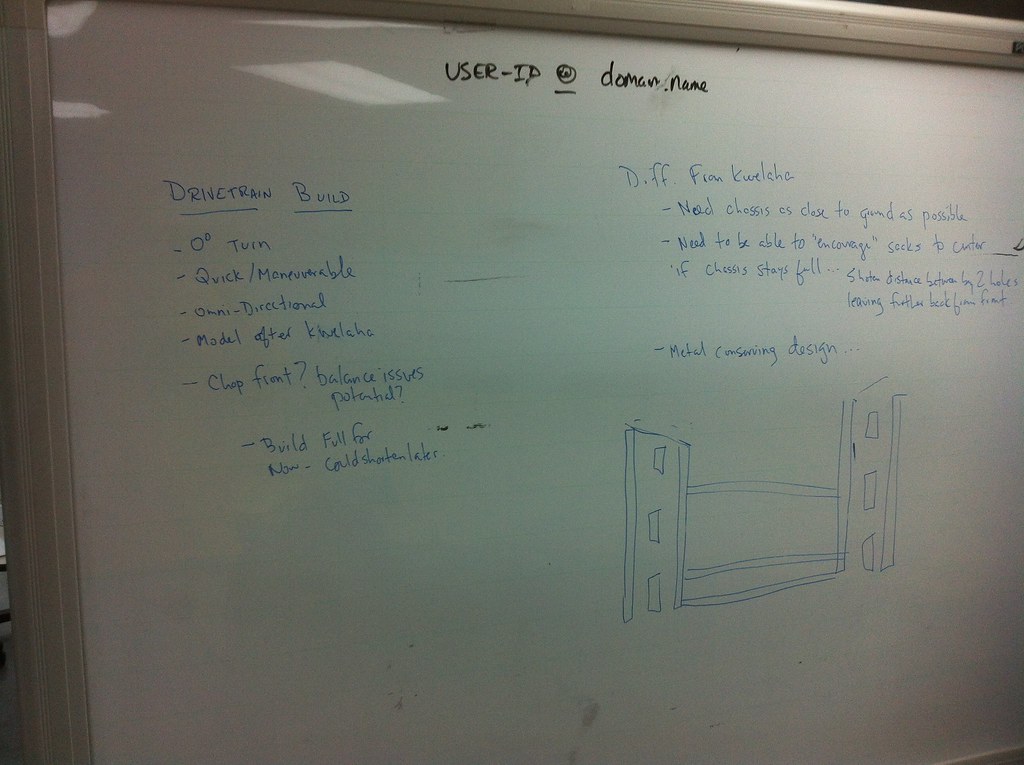
Drivetrain - same agile, multi-directional as last year. Need to test to see if we can "chop" front of chassis back in favor of max wide manipulator as long as robots won't tip over - need to test. Also need to skirt/protect robot chassis so no sacks are driven upon.
Manipulator -
- accumulator of some kind
- scoring in trough and high goal is more desired than scoring low
- Trough has an immense capacity as compared to high goal - also more accessible
be able to descore trough, then high, then low.
Our next meeting is not until the end of May. Before then we may getting together to paint chassis metal and perhaps advance our thinking in these areas.
Best wishes to all teams, and see you here in a few weeks.
-Kressly






.JPG)
.JPG)