Today was dedicated to bringing team members who were absent last meeting up to speed and then we focused on completing assembly of our drivetrain and chassis v1.0. Reversing those backwards rivets (woooooopsie, Kressly) was the first order of business, then mounting motors, integrating the two wheel channels, then lastly installing two center sideways omni-wheels (thanks again FRC/VRC 148) to complete the initial design. Along the way we made little adjustments to position of shaft collars and spacers (a practice we need to continue next time) to allow for more modular and quicker dis- and reassembly.
Here's the product of our labors:
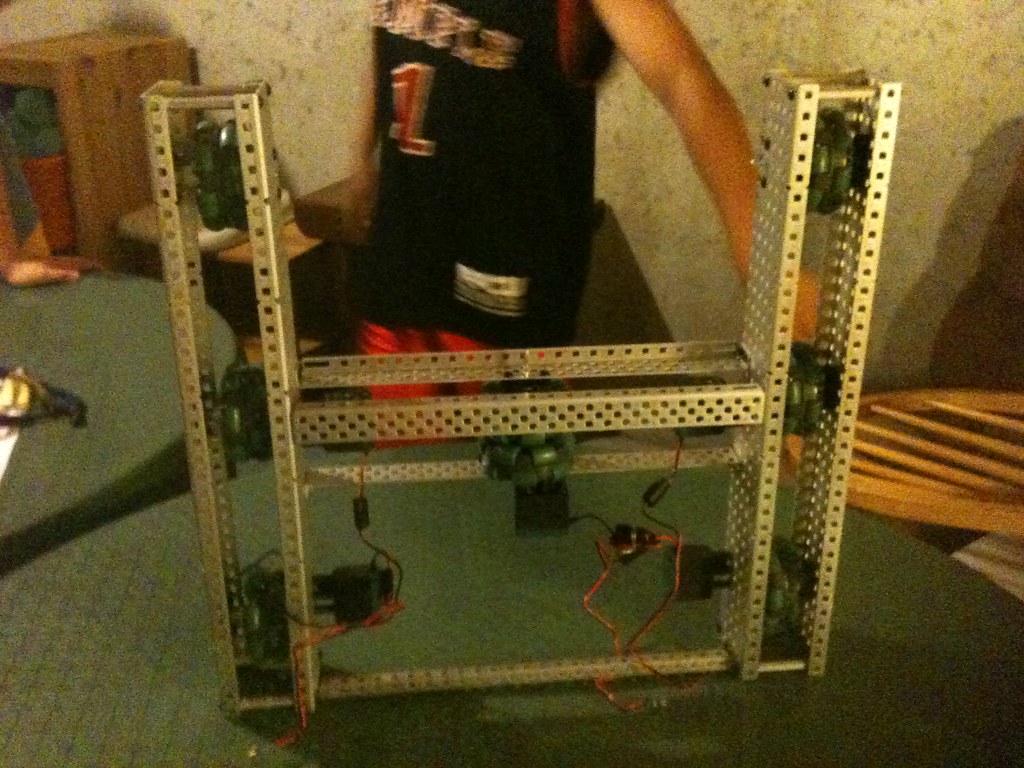
More pictures from the meeting are here
Does this drivetrain and chassis meet our brainstormed priority criteria of: 1. omni-directional, 2. robust, 3. zero turning radius, and 4. quick ???? That's what we should learn at our next meeting when we add a microcontroller and fire up a live VRC 1414 robot for the very first time on Thursday. I can't wait ... stay tuned!
-kressly
No comments:
Post a Comment