The 7/5 meeting time was eaten up with drivetrain iterations. We were unhappy with the fact out two stacked center/sideways wheels weren't always contacting the field tiles. However, the field tiles were laid on top of overlapping carpet remnants, thus the first order of business was to yank/roll up the offending carpet and lay the field tiles flat on the floor so we could retest the drivetrain to see it we "really" had an issue. Sure enough, the sideways wheels still weren't performing as desired because...
b. my basement floor isn't totally levelWe retested one more time, taking closer looks at everythnig and concluded that both a AND b were the culprits. However, we also concluded, that ANY floor we compete out could be less than level, so after flushing the rails we also went through three more iterations of the center/sideways wheel layout. v1.1 we split the wheels across the horizontal of the drivetrain using three gears and the same single motor. Results were somewhere between "no change" and "worse." v1.2 we went back to the stacked single shaft for both of these wheels, spreading a greater front to back distance between the two center sideways wheels. We liked these results but felt we could do even better with a longer spread between the two rails, thus we landed on v1.3 (as seen below) which, by far, tested the best! We'll keep it this way to practice and only tweak if performance worsens with wheel wear and addition of object manipulator(s).

So, with those additional (and much needed) drivetrain iterations, we were out of time to begin manipulator discussions an calculations. Thus, our July 8 meeting held three agenda items:
1. Trim shaft to size for for v1.3 of our drivetrain
2. Use Pythagorean Theorem and cardboard lengths to plan for a single jointed arm with the lowest possible pivot point (to keep COG down) that could reach well over the 30" goal (33" to 34" should give use the clearance we desire).
3. Learn about the basic types of robotic object manipulators and decide what our best option would be.
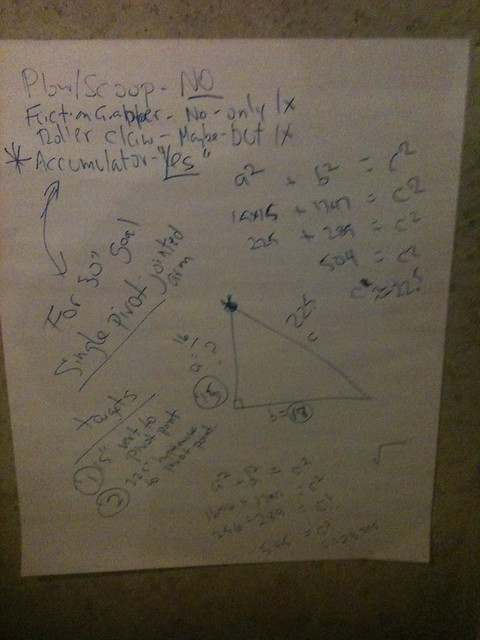
We got right to business as the first two Robograves arrived and too care of item 1 in short order. All attending also learned a little about cutting and filing efficiently and safely. For item 2 we assembled with notebooks, calculators, our theorem, cardboard strips of varied lengths we cut last time, and a loose piece of shaft. After reviewing the theorem, doing a few iterations of math in notebooks and on our chart paper, then testing it out with our cardboard and shaft, we were able to set our target arm distances of 15" vertically from the floor to the pivot point and approximately 22.5" from tip of manipulator to the pivot point (hypotenuse of the triangle). Here's part of the process:

To complete item 3 on the agenda, we reviewed definitions and examples of different types of robotic object manipulators, then applied the knowledge to the Gateway game and our agreed upon manipulator priorities to conclude our most desired manipulator was an accumulator of some kind. So all together we can safely say, we now would optimally like a single jointed arm that elevated and lowers an accumulator.
So, we concluded our meeting researching internet video of past VEX competitions that had single jointed arm accumulators to get ideas. We learned a lot by doing this including Bryan's revelation of, "It's best to look for finals matches at events because they are the best robots ... and they are almost ALL accumulators!" This was excellent validation for a team that hasn't "been there" or "done that" ... yet!
With our agenda items taken care of there was even time left for our two video research groups to sketch some ideas for what our arm/manipulator might look like and make very detailed engineering notebook entries for the day.
I like the way our team is starting to come together and looking forward to beginning our manipulator build.
Until next time,
Kressly
No comments:
Post a Comment